窗体顶端
谢文博
 副教授,硕士生导师
副教授,硕士生导师
邮箱:xiewenbo@shu.edu.cn
联系电话:13836194085(微信同号)
l个人简介
谢文博,上海大学机自学院副教授、硕士生导师。
从事无人艇自主规划、控制与决策系统,船舶动力定位系统,线性/非线性控制理论等方面的研究。主持国家自然科学基金面上/青年项目、黑龙江省优秀青年科学基金、中国博士后基金面上项目等多项纵向课题,参与国家装备预先研究共有技术项目、工信部高技术船舶重点项目等课题。已发表学术论文近60篇,包括SCI源期刊论文30余篇,其中第一/通讯作者SCI论文20余篇,ESI高被引论文2篇,入选IEEE Transactions on Fuzzy Systems期刊 “Most Popular Paper”论文1篇,并授权专利近20项。现担任中国指挥与控制学会智能控制与系统专委会委员,中国自动化学会青年工作委员会委员,IEEE Power & Energy Society智能电网与新技术委员会(中国)常务理事,《中国舰船研究》青年编委, IEEE Control Systems Society和IEEE Information Electronics Society会员。
l主要研究领域
1.无人艇自主规划、控制与决策:包括无人艇自主规划、航行控制、靠离泊控制、决策与博弈等方面;无人气垫船自主规划与控制功能;多无人拖船系统;海上列车系统;
2.动力定位控制系统:包括船舶状态滤波、观测与高精度定位、循迹等控制功能;海上廊桥控制系统;
3.先进控制理论:基于T-S/多项式模糊系统的高精度控制方法设计;卫星地面低重力模拟系统等各类非线性系统控制方法设计。
l代表性成果
在国内外学术期刊发表论文近60篇,包括SCI源期刊论文30余篇,ESI高被引论文2篇,授权国家专利近20项。其中代表性成果有:
▪ 代表性论文
[1]Wen-Bo Xie*, Jie Yang, Anh-Tu Nguyen, Zhan-Xiang Cao. Piecewise reconstruction of membership function approximation errors for Takagi-Sugeno fuzzy control. Engineering Applications of Artificial Intelligence, 2024, 129: 107646. (中科院TOP期刊)
[2]Hua Zheng, Wen-Bo Xie*, Ahn-Tu Nguyen, Dong Qu. A model reconstruction approach for control synthesis of Takagi-Sugeno fuzzy systems. Fuzzy Sets and Systems, 2023, 469: 108640. (中科院TOP期刊)
[3]Ming-Yang Li, Long-Tao Liu, Wen-Bo Xie*, Ji-Tao Li. Collision avoidance fault-tolerant control for dynamic positioning vessels under thruster faults. Ocean Engineering, 2023, 286: 115458. (中科院TOP期刊)
[4]Hai-Bin Wang*, Wen-Bo Xie*, Peng Wang, Yuan-Hui Wang, Shuzhi Sam Ge. Prescribed performance control for dynamic positioning vessels with a dynamic event-triggered mechanism. Ocean Engineering, 2023, 281: 114878. (中科院TOP期刊)
[5]Wen-Bo Xie, Hua Zheng, Ming-Yang Li*, Choon-Ki Ahn*. Membership functions dependent local linear controller design for T-S fuzzy systems. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2022, 52(2): 814-821. (中科院TOP期刊)
[6]Wen-Bo Xie, Jian Zhang*, Yi-fan Li, Reinaldo M Palhares. A novel polynomial membership functions based control method for T-S fuzzy systems. ISA Transactions, 2022, 129(B): 192-203. (中科院TOP期刊)
[7]Wen-Bo Xie*, Bo-Lin Xu, Chen Peng, Jian Zhang. Nonuniform piecewise membership function approximation methods based robust tracking control design of T-S fuzzy systems. International Journal of Robust and Nonlinear Control, 2022, 32: 4980-5001. (中科院TOP期刊)
[8]Ming-Yang Li, Wen-Bo Xie*, Yu-Long Wang, Xin Hu. Prescribed performance trajectory tracking fault-tolerant control for dynamic positioning vessels under velocity constraints. Applied Mathematics and Computation, 2022, 431: 127348. (中科院TOP期刊)
[9]Wen-Bo Xie*, Bing Liu, Lin-Wei Bu, Yu-Long Wang, Jian Zhang. A decoupling approach for observer-based controller design of T-S fuzzy system with unknown premise variables. IEEE Transactions on Fuzzy Systems, 2021, 29(9): 2714-2725. (中科院TOP期刊,ESI高被引论文)
[10]Wen-Bo Xie*, Ming-Hao Guo, Bo-Lin Xu, Xin Wang. Fault tolerant robust control with transients for over-actuated nonlinear systems. Nonlinear Dynamics, 2021, 104(3): 2433-2450. (中科院核心期刊)
[11]Jian Zhang, Wen-Jie Wu, Wen-Bo Xie*, Chen Peng. Dimensional-varying integral sliding mode controller design for uncertain T-S fuzzy systems. Information Sciences, 2021: 565, 77-90. (中科院TOP期刊)
[12]Wen-Bo Xie*, Song Sang, Hak-Keung Lam, Jian Zhang. A polynomial-membership-function approach for stability analysis of fuzzy systems. IEEE Transactions on Fuzzy Systems, 2020, 29(8): 2077-2087. (中科院TOP期刊,ESI高被引论文)
[13]He Li, Wen-Bo Xie*, Hak-Keung Lam, Jian Zhang. Membership function derivatives transformation approach for stability analysis of T-S fuzzy systems. IEEE Transactions on Cybernetics, 2020, 52(8): 7906-7912. (中科院TOP期刊)
[14]Hua Zheng, Wen-Bo Xie*, Hak-Keung Lam, Li-Kui Wang. Membership functions dependent stability analysis and local controller design for T-S fuzzy systems: a space enveloping approach. Information Sciences, 2020, 548: 233-253. (中科院TOP期刊)
[15]Wen-Bo Xie*, Yu-Long Wang, Jian Zhang, Ming-Yu Fu. Novel separation principle based H-infinity observer-controller design for a class of T-S fuzzy systems. IEEE Transactions on Fuzzy Systems, 2018, 26(6): 3206-3221. (中科院TOP期刊)
¶更多论文列表:https://www.researchgate.net/profile/Wenbo-Xie-3
▪ 代表性授权专利
[1]李鸣阳, 谢文博, 凌修伟, 张冲, 景世龙. 一种速度受限的静水下动力定位船轨迹跟踪预设性能控制方法. 发明专利. 专利号: ZL2020105684864.
[2]李鸣阳, 谢文博, 赵雪春, 凌修伟, 蔣金波. 一种推进器故障时水面船轨迹跟踪的二阶预设性能容错控制方法. 发明专利. 专利号: ZL2020105673592.
[3]谢文博, 王通智, 李鸣阳, 朱松, 刘振, 张健. 一种悬吊漂浮物随动系统的降维观测器和控制器设计方法. 发明专利. 授权号: ZL201910177185.6.
[4]张健, 陈芃樾, 谢文博, 刘龙, 赵豪, 熊仟, 刘岱. 一种基于观测器的增压柴油机气路抗干扰容错控制方法. 发明专利. 授权号: ZL201910938505.5.
[5]谢文博, 卜林卫, 张健, 许家忠, 尤波, 黄玲. 一种双冗余PSD自准直仪吊索摆角的测量方法. 发明专利. 授权号: ZL201711071977.
[6]谢文博, 张玉双, 牟笑阳, 张健, 许家忠, 尤波, 黄玲. 一种补偿执行机构死区非线性的自适应状态反馈控制方法. 发明专利. 授权号: ZL2017101840 30.6.
[7]谢文博, 张泽宇, 李伟俊, 张健, 黄玲, 许家忠, 尤波. 一种根据电流积分消除直流电机空程的方法. 发明专利. 授权号: ZL201710094031.1.
[8]谢文博, 李伟俊, 张玉双, 张泽宇, 张健, 黄玲, 尤波. 一种基于直流电机电流方差滚动计算的转向机构大空程补偿方法. 发明专利. 授权号: ZL201610 2948559.
[9]尤波, 高扬, 谢文博, 许家忠, 李智. 一种悬吊漂浮物随动系统的欠驱动滑模控制方法. 发明专利. 授权号: ZL201510859604.6.
[10]谢文博, 张健, 许家忠, 高海波, 刘振, 尤波, 黄玲. 一种悬吊漂浮物随动系统的加速度补偿控制方法及基于模式选择的控制方法. 发明专利. 授权号: ZL2014104823262.
[11]付明玉, 谢文博, 邢家伟, 王元慧. 一种动力定位船舶水动力系数辨识方法. 发明专利. 授权号: ZL201210149980.2.
▪ 成果展示
Ø研究成果1:无人拖船系统
针对大型船舶进出港时的拖轮拖拽作业问题,综合考虑受限水域环境、系统参数不确定性、运动学约束以及障碍物规避等实际问题,围绕智能无人拖船的路径规划、运动控制以及推力分配策略等问题展开了深入研究,取得了良好效果。

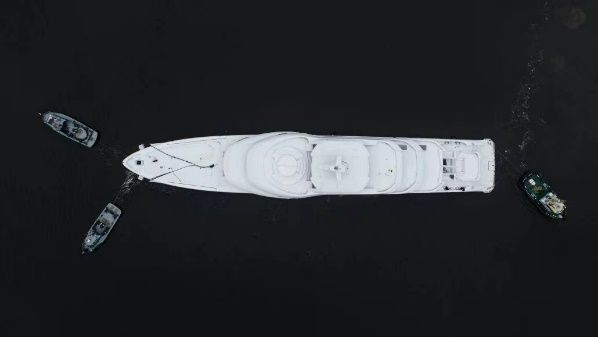
智能多无人拖船系统
Ø研究成果2:无人艇“海上列车”
针对多无人艇航行过程中进行组合编队问题,研究组建“海上列车”的协同运动控制过程,综合考虑运动学和动力学约束、多艇间水动力相互影响,海浪导致高频运动不利于对接等因素,解决多艇逼近和对接运动过程的规划与控制问题。
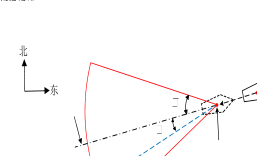
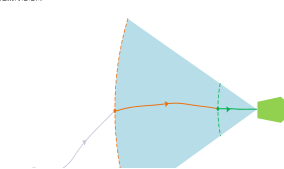
无人艇组建 “海上列车”
Ø研究成果3:船舶动力定位控制系统
针对复杂海况下的船舶动力定位作业任务,考虑推进器推力受限和各类故障,研究船舶低频运动状态观测、高精度定位、循迹跟踪作业、喷泵无人艇自主靠离泊等功能,在进行实船实验过程中,与Kongsberg公司产品进行传感器完全失效时的短时(5分钟)定位控制实验,漂移距离明显降低,控制精度得到大幅提高。
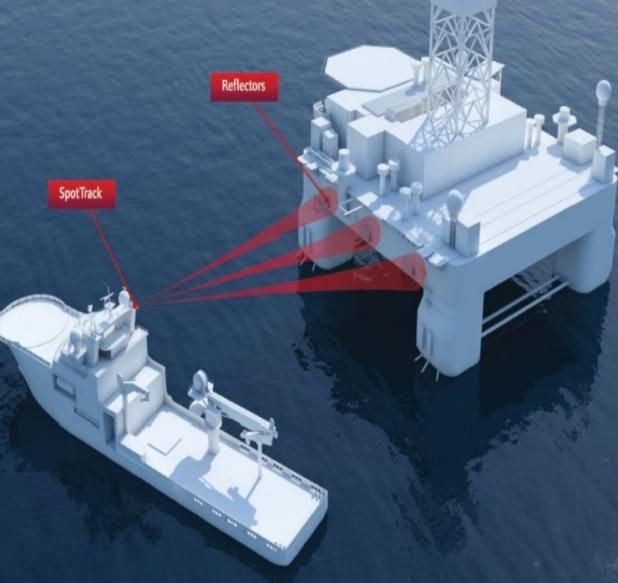
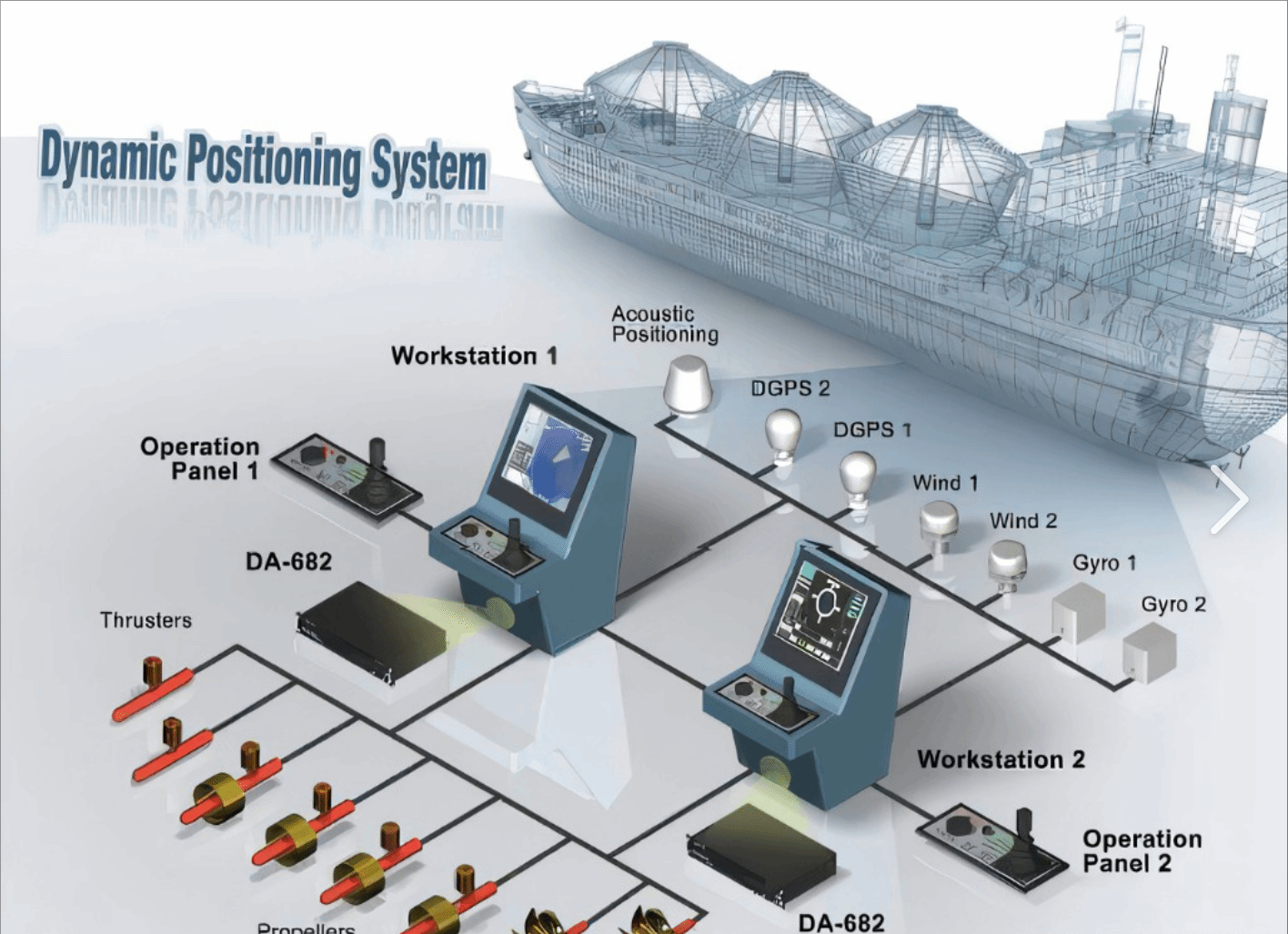
动力定位船舶与控制系统
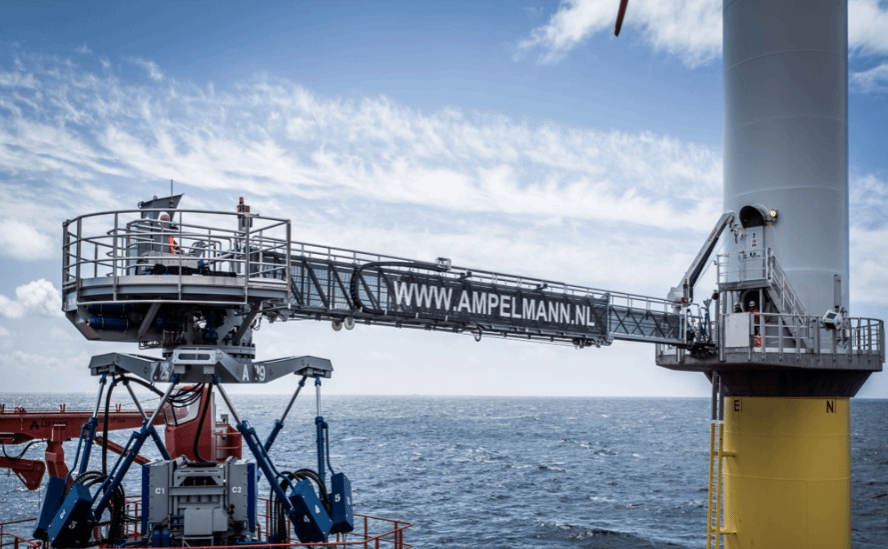
Ø研究成果4:海上廊桥
针对恶劣海洋环境下,船舶之间以及船舶与海上工程平台之间的人员物资转运问题,综合考虑运动学和动力学约束,海浪的随机干扰以及廊桥表面的未知时变负载等因素,,对基于混联等机构的海上廊桥控制问题进行了深入研究,取得了良好效果。

Ø研究成果5:先进控制理论研究
针对非线性系统的鲁棒等控制问题,基于T-S/多项式模糊系统,研究观测器-控制器结构的输出反馈设计与如何在稳定性分析中更有效的引入隶属度函数信息并增强鲁棒性,在国际上获得了一定的认可。
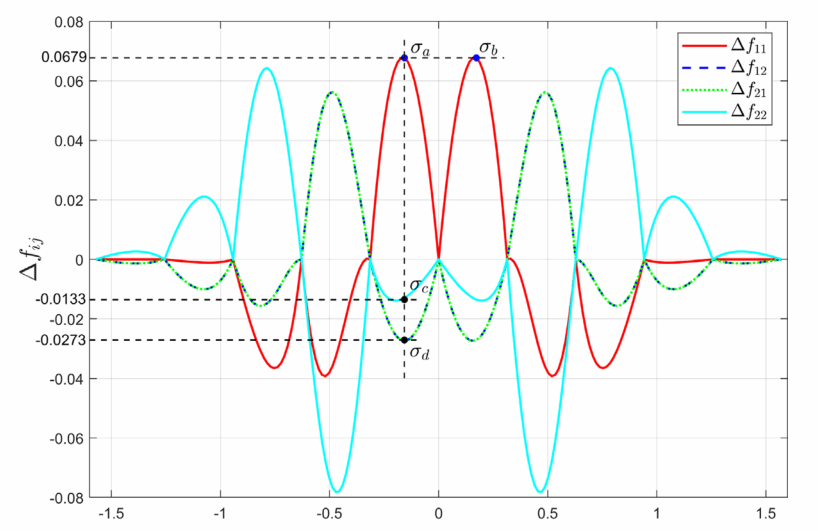
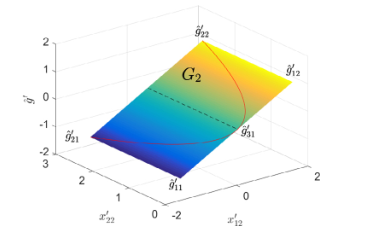
各类T-S/多项式模糊系统隶属度信息使用策略
l科研项目
主持与在研项目
1.国家自然科学基金面上项目,海上特种作业无人艇的强鲁棒性动力定位控制方法研究,50万元,负责人,2024.01-2027.12
2.国家自然科学基金青年项目,受限T-S模糊系统输出反馈控制及其应用研究,24万元,负责人,2019.01-2021.12
3.黑龙江省科学基金优秀青年项目,T-S模糊系统有限频域观测器-控制器研究及应用,10万元,负责人,2019.7-2022.6
4.中国博士后基金面上项目,T-S模糊系统低保守性控制方法的研究与应用,8万元,负责人,2020.1-2021.06
5.黑龙江省自然科学基金青年项目,执行机构饱和受限的船舶动力定位控制研究,5万元,负责人,2015.07-2018.04
6.黑龙江省普通高等学校创新人才项目,基于T-S模糊系统的复杂输入饱和条件下船舶动力定位控制研究,10万元,负责人,2017.11-2020.10
7.黑龙江省级领军人才梯队后备带头人资助,黑龙江省人社厅,3万元,负责人,2021.1-2022.12
8.JKW XXX工程课题,XXX平台研制,138万元,负责人,2023.07-2025.06
9.国内首套悬吊式随动卫星模拟控制系统-随动控制模块,横向课题,25万元,负责人,2015.01-2017.12;
10.装备发展部, 装备预先研究领域基金快速扶持项目, 80912020305, 无人艇平台与XXXX耦合联动控制方法研究,50万元,参与
11.装备发展部, 装备预先研究共有技术项目,XXX,典型复杂XXX控制技术, 400万元,参与
曾参研项目
作为骨干成员参与了国家重大科技专项、工信部以及装备发展部等项目,项目涉及到国内首套DP3动力定位系统研制、无人艇相关运动控制、机器人协同控制、深水铺管起重船控制系统以及气垫船训练模拟器等内容,总经费高达1.28亿元(其中“工信部高科技船舶科研项目—DP3动力定位系统研制”经费高达1.18亿元 )。
l国际合作
Ø与澳大利亚阿德莱德大学、英国国王学院、法国上法兰西大区理工学校、巴西米纳斯联邦大学等多个高校的知名学者保持紧密合作;
Ø澳大利亚阿德莱德大学博士后访学(2015-2016)。
l招生信息
每年招收硕士研究生2名,欢迎对无人艇自主智能规划与控制、集群规划与避障、控制理论等方向感兴趣的同学报考,要求有一定的控制理论和数学基础,英语读写能力较强。