近日,我院刘娜副研究员课题组和香港中文大学(深圳)俞江帆助理教授合作,在国际著名期刊《Nature Communications》(IF:16.6)上发表题为“A magnetic multi-layer soft robot for on-demand targeted adhesion”的研究论文。
磁性软体机器人由于其尺度优势和柔顺性,可以作为医疗机器人以无创的方式在外部磁场的驱动下进入人体器官或组织执行手术或者递送药物。目前,研究人员已经开发出可以实现多模态多环境运动的磁性软体机器人,并且与功能材料的结合使其在生物医学应用中显示出巨大的潜力。特别是具有多层结构的磁性软机器人可以进一步提高药物的装载能力和功能的多样性成为当前的研究热点,但层与层之间的相互作用尚未得到充分研究,要实现具有按需运动模式的磁性多层软体机器人仍然面临相当大的挑战。
对此,研究组通过研究并调控材料界面和层与层之间的磁相互作用,设计并制备了一种磁性多层软体机器人(图1):该机器人具三层结构,每层结构包括一个软磁性基底和一个粘附膜,可在磁吸引的作用下层结构自组装成磁性多层软体机器人(图1a),并且够被轻易的卷曲置入可食用胶囊内(图1c),在磁场控制下实现形态变化和层结构间的按需脱离(图1b);该机器人的多靶点按需贴附功能在活体猪胃上得到了验证。
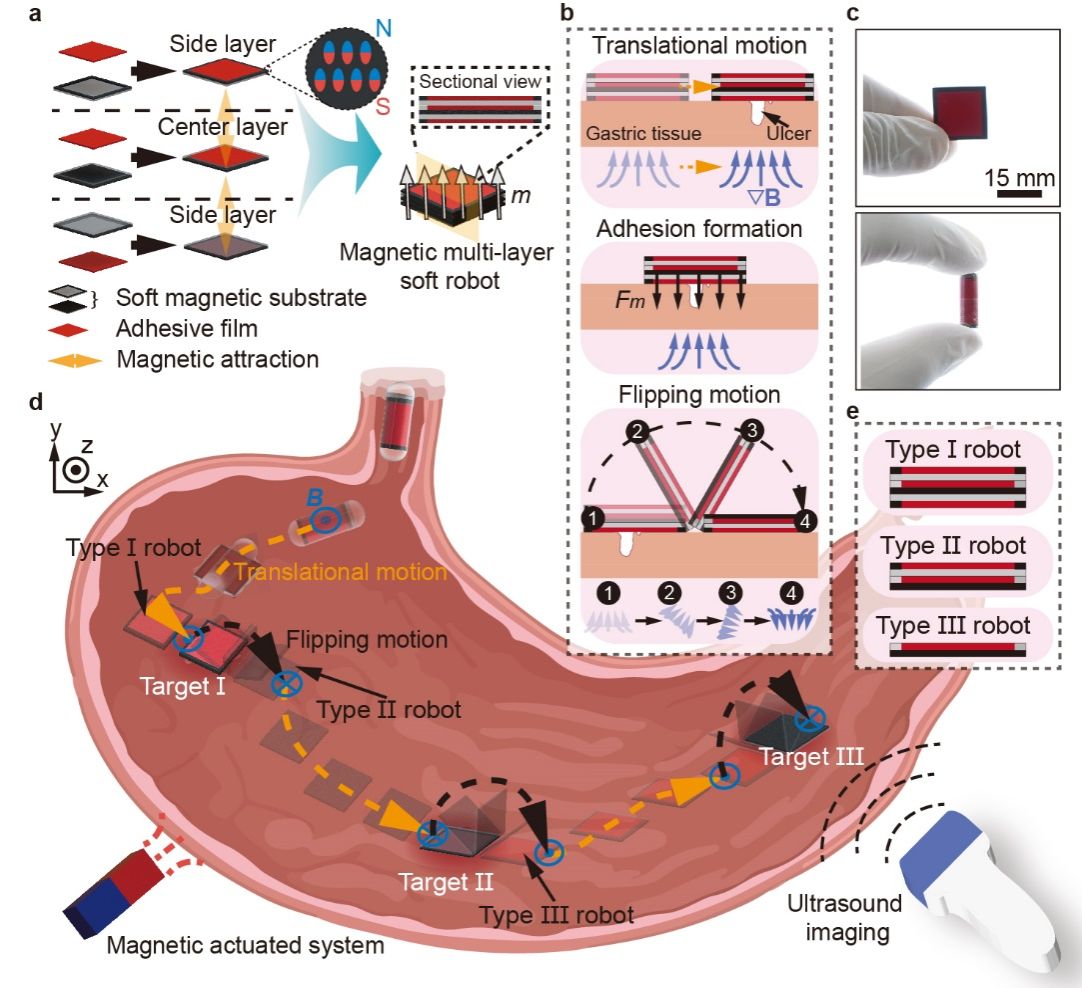
图1. 磁性多层软体机器人多靶点贴附的概念展示
上海大学为本文第一署名单位,上海大学博士研究生陈子衡为论文第一作者,香港中文大学(深圳)博士研究生王一斌为共同第一作者,上海大学刘娜副研究员和香港中文大学(深圳)俞江帆助理教授为共同通讯作者。本研究得到了国家重点研发计划项目(编号:2022YFA1207100)、国家自然科学基金项目(编号:62103347、62073208和61933008)、上海市教委创新计划(编号:2021-01-07-00-09-E0013)、深圳市科技计划(编号:RCBS20210609103155061)、广东省基础与应用基础研究基金项目(编号:2022A1515110499)、深圳市人工智能与机器人社会研究院项目(编号:AC01202101109),上海市科技计划项目(编号:23ZR1422300)的资助。
论文链接: https://www.nature.com/articles/s41467-024-44995-9